Section outline
-
Enseignant de la matière : Dr. OUARET Ahmed
Adresse E-mail : ahmed.ouaret@univ-bejaia.dz
Niveau : L2
Spécialité : Automatique
Unité d'enseignement : UEM 2.2
Crédits : 2
Coefficients : 1
Volume horaire global :22h30
Volume horaire de travail requis/semaine: 01h30
Mode d’évaluation : Contrôle continu : 100 % -
Version mise à jour
-
-
-
But du TP : Le but de ce TP est de familiariser les étudiants à l’utilisation du logiciel Matlab/Simulink.
496.4 KB · Uploaded 20/04/22, 10:35 -
La date limite de remise de ce travail est le mercredi 25/05/2022.
371.6 KB · Modified 10/05/22, 09:43 -
Veuillez utiliser ce forum pour poser vos questions sur la série du TP N°01 ou bien pour répondre aux questions de vos camarades.
-
-
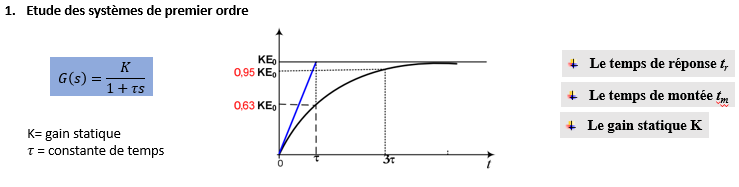
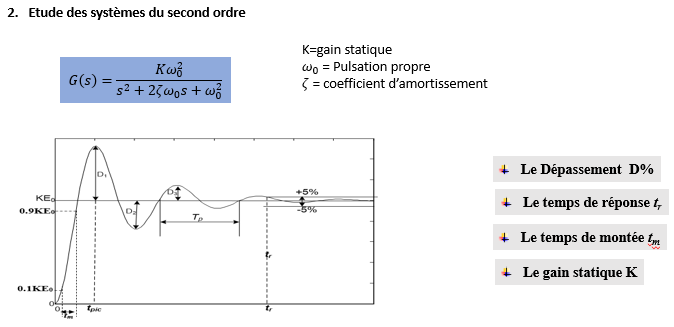
But du TP : Le but de ce TP est d’étudier les caractéristiques temporelles des deux systèmes fondamentaux en automatique à savoir le premier ordre et le second ordre. Ces caractéristiques sont principalement le gain statique, le temps de réponse, le temps de montée, le temps de pic et le dépassement.
-
-
Objectif du TP :
- Ce TP a pour but d’étudier le comportement fréquentielle des systèmes linéaires continue du 1er et du 2ième ordre.
- Relever les mesures nécessaires pour tracer le diagramme de Bode et relever les caractéristiques des systèmes ainsi que ses paramètres intrinsèques
-
But du TP : Le but de ce TP est d’étudier les caractéristiques temporelles des deux systèmes fondamentaux en automatique à savoir le premier ordre et le second ordre. Ces caractéristiques sont principalement le gain statique, le temps de réponse, le temps de montée, le temps de pic et le dépassement.
------------------------------------------------------------------------------------------
------------------------------------------------------------------------------------------
-
Objectif du TP :
- Comprendre comment réalisé un système pratique de régulation de vitesse d'un moteur à courant continu.
- Comprendre l'effet des correcteurs classiques (P-I-PI) sur les performance de la régulation d'un moteur à courant continu (Rapidité, Précision et Stabilité).
Réglage d'un PI
Le réglage d'un PI consiste à déterminer les coefficients et afin d'obtenir une réponse adéquate du procédé et de la régulation. Les objectifs sont d'être robuste, rapide et précis. Il faut pour cela :
- dans le cas d'un fonctionnement en mode de régulation (consigne fixe) choisir des réglages permettant à la grandeur réglée de retourner dans un temps raisonnable à sa valeur de consigne ;
- dans le cas de fonctionnement de la boucle en mode d'asservissement (consigne variable), choisir des réglages permettant de limiter le ou les éventuels dépassements (overshoot) de la grandeur réglée ;
- la robustesse est sans doute le paramètre le plus important et délicat. On dit qu'un système est robuste si la régulation fonctionne toujours même si le modèle change un peu.
- la rapidité du régulateur dépend du temps de montée et du temps d'établissement du régime stationnaire ;
- le critère de précision est basé sur l'erreur statique.
La réponse type d'un procédé stable est la suivante :

Dans le cas des systèmes simples, les paramètres du PI influencent la réponse du système de la manière suivante :
- : lorsque augmente, le temps de montée (rise time) est plus court et l'erreur statique est réduite, mais il provoque un dépassement plus important.
- : lorsque est présent l'erreur statique est annulée. Quand il augmente, la valeur finale est plus rapidement atteinte pour les systèmes présentant de grandes marges de stabilité. Le temps d'établissement en régime stationnaire s'allonge pour les autres systèmes qui vont davantage osciller. Le réglage de ce paramètre dépend donc du comportement dynamique du système et influe sur son amortissement et son temps de réponse.
-
- pourquoi l’asservir en vitesse ? Et pourquoi pas, c’est toujours utile de savoir créer un asservissement en vitesse. Par exemple pour faire avancer droit un robot qui possède deux moteurs de récupération différents (à condition d’avoir les datasheets des deux moteurs) !
Objectifs.
L’étudiant doit être capable de :
• Modéliser le moteur à courant continu par son schéma fonctionnel et déterminer sa fonction de transfert.
• Identifier le modèle du moteur par l’application des essais en boucle ouverte.
• Comprendre et câbler les éléments da la chaîne de régulation de vitesse d’un moteur à courant continu.
• Visualiser le comportement du système en utilisant les différents types de régulateurs analogiques : P, PI, PD et PID.
• Comprendre le rôle de chaque action du régulateur.
• Sélectionner le régulateur convenable qui donne les meilleurs performances du système de point de vu stabilité, précision et rapidité.==================================================================================
Régulation
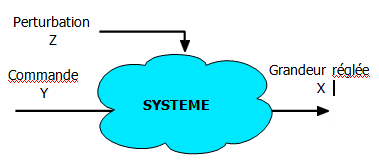
- Définitions : la régulation regroupe l’ensemble des techniques utilisées visant à contrôler une grandeur physique. Exemples de grandeur physique : Pression, température, débit, niveau etc…
- La grandeur réglée : c’est la grandeur physique que l’on désire contrôler. Elle donne son nom à la régulation. Exemple : une régulation de température.
- La consigne : C’est la valeur que doit prendre la grandeur réglée.
- La grandeur réglante: est la grandeur physique qui a été choisie pour contrôler la grandeur réglée. Elle n’est généralement pas de même nature que la grandeur réglée.
- Les grandeurs perturbatrices: sont les grandeurs physiques qui influencent la grandeur réglée. Elles sont généralement pas de même nature que la grandeur réglée.
1. Baisse du coût de l’installation et gain de temps
On reconnaît une bonne régulation par sa capacité à accélérer le système sans entraîner de dépassement de la consigne. Dans l’exemple ci-dessous une bonne régulation entraîne une diminution du temps nécessaire à l’élévation de la température, ainsi que l’économie d’un dispositif de refroidissement .
Régulation ou Asservissement
- Dans une régulation, on s’attachera à maintenir constante la grandeur réglée d’un système soumis à des perturbations.
- Dans un asservissement, la grandeur réglée devra suivre rapidement les variations de la consigne.
Les servomécanismes
On appelle servomécanisme, un système asservi dont le rôle consiste à amplifier la puissance et dont la grandeur réglée est une grandeur mécanique tel qu’un effort, un couple, la position ou l’une de ses dérivées par rapport au temps, comme la vitesse et l’accélération.
Principe de fonctionnement
Pour réguler un système physique, il faut :
- Mesurer la grandeur réglée avec un capteur.
- Réfléchir sur l’attitude à suivre : c’est la fonction du régulateur. Le régulateur compare la grandeur réglée avec la consigne et élabore le signal de commande.
- Agir sur la grandeur réglante par l’intermédiaire d’un organe de réglage. On peut représenter une régulation de la manière suivante :

1. Fonctionnement en boucle ouverte (Manuel)
On parle de fonctionnement en boucle ouverte quand c’est l’opérateur qui contrôle l’organe de réglage. Ce n’est pas une régulation.
2. Fonctionnement en boucle fermée (Automatique)
C’est le fonctionnement normal d’une régulation. Le régulateur compare la mesure de la grandeur réglée et la consigne et agit en conséquence pour s’en rapprocher.

-
Des sites d'auto-apprentissage qui pourraient vous intéresser, y compris des sites d'éducation et de formation gratuits.
1- www.edx.org11- www.oli.cmu.edu12- www.oyc.yale.edu14- www.lynda.com15- www.maharah.net16- www.ck12.org17- www.udemy.com20- www.p2pu.org21- www.ed.ted.comLes meilleurs sites pour télécharger des livres -
Le technicien ou ingénieur en automatisme doit donc avec de bonnes bases sur:
1) Comment utiliser un multimètre.
2) Connaissance de base des capteurs couramment utilisés dans l'industrie par exemple capteur de température (PT100),capteur de pH, transmetteurs, capteurs de proximité etc..
3) Comment câbler un capteur sur un automate
4) Comment choisir un automate ou dimensionner une alimentation électrique
5) C'est quoi la différence entre:
moteur synchrone et moteur asynchrone,
electrovannes, vannes et distributeurs pneumatiques6) Différences entre démarrage direct, démarrage étoile-triangle etc...
7) Quelles sont les différences, les avantages et les inconvénients des signaux 0-20 mA, 4-20 mA, 0-10 V, 2-10 V
8) Quelles sont les différences entre un contact sec, NPN, PNP, etc...
9) Quelles sont les différences entre:
Contact normalement ouvert
Contact normalement fermé10) Quelles sont les différences entre vanne 2/2, 3/2 et 5/2 etc...
11) Comment mettre en œuvre un système de contrôle PID
12) Comment câbler un relais ou un contacteur
13) Connaissances de base en électricité et SCADA
14) Comment lire et comprendre les fiches techniques et manuels d'appareils. En faisant cela, eh bien, vous serez en mesure de savoir comment utiliser presque tous les appareils simplement en connaissant le numéro de modèle et d'avoir une connexion Internet.
15) Avoir des notions en anglais technique
16) Savoir c'est quoi la différence entre IHM et système Scada
17) Savoir c'est quoi la différence entre SNCC et système Scada
18) Connaitre les principaux bus de terrain
19) Avoir des notions sur les variateurs de vitesse
20) Avoir de la patience et continuer à apprendre
Source : https://www.automation-sense.com/blog/automatisme/20-choses-qu-un-automaticien-debutant-doit-absolument-connaitre.html#xtlAukE2VSjepMXb.99


