Section outline
-
- pourquoi l’asservir en vitesse ? Et pourquoi pas, c’est toujours utile de savoir créer un asservissement en vitesse. Par exemple pour faire avancer droit un robot qui possède deux moteurs de récupération différents (à condition d’avoir les datasheets des deux moteurs) !
Objectifs.
L’étudiant doit être capable de :
• Modéliser le moteur à courant continu par son schéma fonctionnel et déterminer sa fonction de transfert.
• Identifier le modèle du moteur par l’application des essais en boucle ouverte.
• Comprendre et câbler les éléments da la chaîne de régulation de vitesse d’un moteur à courant continu.
• Visualiser le comportement du système en utilisant les différents types de régulateurs analogiques : P, PI, PD et PID.
• Comprendre le rôle de chaque action du régulateur.
• Sélectionner le régulateur convenable qui donne les meilleurs performances du système de point de vu stabilité, précision et rapidité.==================================================================================
Régulation
- Définitions : la régulation regroupe l’ensemble des techniques utilisées visant à contrôler une grandeur physique. Exemples de grandeur physique : Pression, température, débit, niveau etc…
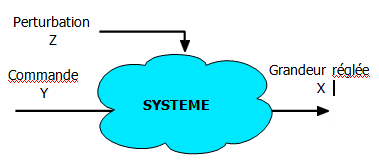
- La grandeur réglée : c’est la grandeur physique que l’on désire contrôler. Elle donne son nom à la régulation. Exemple : une régulation de température.
- La consigne : C’est la valeur que doit prendre la grandeur réglée.
- La grandeur réglante: est la grandeur physique qui a été choisie pour contrôler la grandeur réglée. Elle n’est généralement pas de même nature que la grandeur réglée.
- Les grandeurs perturbatrices: sont les grandeurs physiques qui influencent la grandeur réglée. Elles sont généralement pas de même nature que la grandeur réglée.
1. Baisse du coût de l’installation et gain de temps
On reconnaît une bonne régulation par sa capacité à accélérer le système sans entraîner de dépassement de la consigne. Dans l’exemple ci-dessous une bonne régulation entraîne une diminution du temps nécessaire à l’élévation de la température, ainsi que l’économie d’un dispositif de refroidissement .
Régulation ou Asservissement
- Dans une régulation, on s’attachera à maintenir constante la grandeur réglée d’un système soumis à des perturbations.
- Dans un asservissement, la grandeur réglée devra suivre rapidement les variations de la consigne.
Les servomécanismes
On appelle servomécanisme, un système asservi dont le rôle consiste à amplifier la puissance et dont la grandeur réglée est une grandeur mécanique tel qu’un effort, un couple, la position ou l’une de ses dérivées par rapport au temps, comme la vitesse et l’accélération.
Principe de fonctionnement
Pour réguler un système physique, il faut :
- Mesurer la grandeur réglée avec un capteur.
- Réfléchir sur l’attitude à suivre : c’est la fonction du régulateur. Le régulateur compare la grandeur réglée avec la consigne et élabore le signal de commande.
- Agir sur la grandeur réglante par l’intermédiaire d’un organe de réglage. On peut représenter une régulation de la manière suivante :

1. Fonctionnement en boucle ouverte (Manuel)
On parle de fonctionnement en boucle ouverte quand c’est l’opérateur qui contrôle l’organe de réglage. Ce n’est pas une régulation.
2. Fonctionnement en boucle fermée (Automatique)
C’est le fonctionnement normal d’une régulation. Le régulateur compare la mesure de la grandeur réglée et la consigne et agit en conséquence pour s’en rapprocher.
